『 GPS受信器( Global positioning system ) 』
GPS は地球の表面から高さ約2万Km の周回衛星( 地球を 約11時間58分で一周する )
を、経度差60度ごとの6つの軌道に4個ずつ打ち上げた計24個の衛星によって、地球上の
あらゆる地点で、24時間いつでも、どの様な天候でも位置を知る事が出来るシステムです。
現在、GPSは米国で運営されており、以前は、民間用に開放された情報には精度が少し落と
されており、この情報で測定した位置には 約100m 程の誤差が生じました。 大洋航行中の
船舶には、この程度の誤差は問題にならないのですが、狭水道や港内を航行する船舶にとって
は、もっと精度が高い方が安全です。 そこで、海上保安庁は誤差補正電波を送信するDGPS局
を日本全国に27局設置しました。 日本沿岸を航行する船舶はDGPS 受信機により、GPS信号
と、この補正信号を受信する事で、精度の高い船位が得られる様に成りました。DGPS 局から
200Km 以内であれば船位の誤差は10m 以内と言われています。
しかし、2000年頃から米国では、民間用の信号も精度を上げて送信していると聞きました。
追記:当サイトを見て下さった方から下記の様にご指摘がありましたので書き加えます。
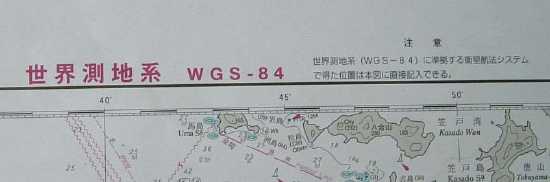
2000年 5月 2日 13時(JST)からは、SAが解除されて、GPSの精度は単独測位で 10m程度
に、海上保安庁の GPS位置補正情報を利用した場合は、1m程度の精度になっています。 |